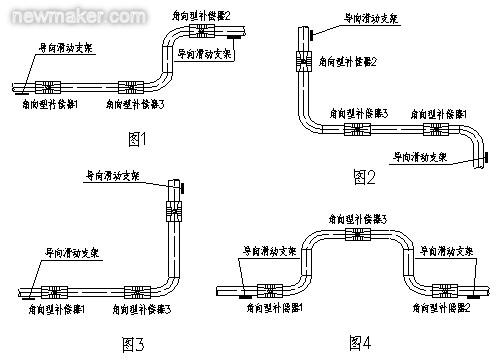
1. 补偿:顺其 ,工作,工作压力和温度范围 宽。但 有现成的地形或平面方位,能使管道有较多的转弯,满意热抵偿的需求。 2.方形补偿器:类似 抵偿,人为地增加方形转弯,以弥补 抵偿器弯头数目的不足。优点也是不受工作压力和温度的限制,缺陷:流体阻力大,占地面积多,管道支架多,不美观,出资较大。用于 抵偿不能满意热抵偿需求时而采用的“ 抵偿”。关于压力4.0MPa的场合,几乎没其他产品能够替换。 3.套筒补偿器:也能够承受较高的压力和温度,抵偿量大,安装方便。缺陷:轻易泄漏,检验频繁、推力大。不能用于对流体纯度需求高的场合。 4.波纹管补偿器:品种较多,分为轴向型(内压和外压或有推力和无推力或排挤型直埋型。。。)、角向型(平面和复式)、和横向型(平面和复式)。应用广,无泄漏,性较好,但运行温度和压力有限制,温度,400度,压力不4.0MPa。角向型通过组合(2到3个),能够满意大位移量和发生小的推力,应用远景光明。本次要点讲述。 5.旋转式补偿器: 近推出的新产品,通过2个组合和管道转弯完成热抵偿。抵偿量大,推力小, 高温度可达到485度,压力可达5.0MPa。制造技术日渐成熟,不易泄漏。但存在管道在不同平面的改变,关于发生凝聚液体的介质的运送管道,需要设置较多的排水排气阀门。 6.球型补偿器:完成角向位移,和波纹管角向抵偿器相同,组合使用,流体阻力小,抵偿量大,无推力。存在易泄漏和测向位移,维修量大。 三、角向型波纹管补偿器(铰链)的应用 1.Z形,横向臂较短,三个铰链组合,如图1。 2.Z形,横向臂较长,三个铰链组合,如图2。 3.L形,三个铰链组合,如图3 4.门形,三个铰链组合,如图4。
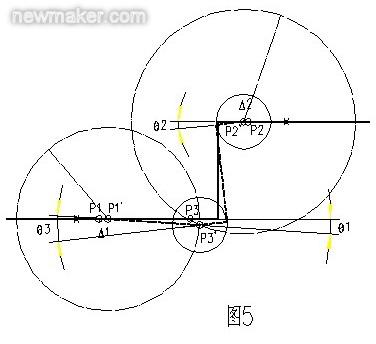
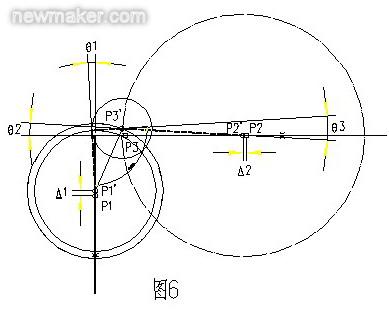
2.铰链1按Δ1位移到胀大后的方位P1’,铰链2按Δ2位移到胀大后的方位P2’。 3.以P1’为圆心,以Z形管三个管段热胀大后二个端点的间隔为半径画圆1。以P2’为圆心,以L23为半径画圆2。 4.圆1和圆2的交点P3’就是铰链3位变形以后的方位 5.以P3’为圆心,以L2为半径画圆3。以P1’为圆心,以L1为半径画圆4。 6.画圆3和圆4的穿插切线,该线就是Z形管胀大后的方位。 7.分别连接该切线的两端与P3’和P1’,Z形管热胀大后的2个短管的方位。 8.再采用CAD视点标注东西,准确量出3个铰链变形后的视点θ1 、θ2 、θ3应满意θ3= θ1 +θ2 。 五、L形,三个铰链组合的图解准确核算(见图6) 1.核算准备:分别核算出热胀大量Δ1和Δ2,再核算出L形管2个管段热胀大后的长度L1、L2。再核算铰链2和3管段热胀大后的长度L23。 2.铰链1按Δ1位移到胀大后的方位P1’。铰链2按Δ2位移到胀大后的方位P2’。 3.以P1’为圆心,以L形管2个管段热胀大后二个端点的间隔为半径画圆1。 4.以P2’为圆心,以L23为半径画圆2。 5.圆1和圆2的交点P3’就是铰链3位变形以后的方位。 6.以P3’为圆心,以L型管长臂热胀后的长度为半径L1为半径画圆1’. 7. 以P3’为出发点,画圆1’的外切线切点 8.分别连接P1’、切点’、P3’和P2’ ,L形管热胀大后的方位。 9.再采用CAD视点标注东西,准确量出3个铰链变形后的视点θ1 、θ2 、θ3应满意θ3= θ1 +θ2。
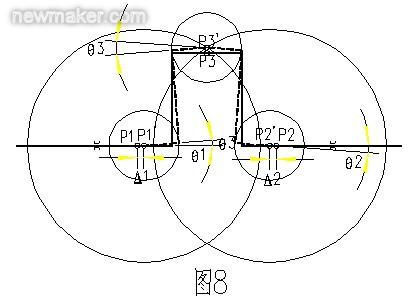
1.和前面的方法差未几,找出铰链1、3变形后的方位P1’ 、P2’。 2.分别以P1’ 、P2’为圆心,以与之相连的短臂的热胀大后的长度为半径画2个圆,得出交点P3’。 3.再以P2’、P3’为圆心,分别以L形短臂热胀大后的长度为半径,画2个圆,得出交点。 4.分别连接P2’、P3’到这个交点,所的连线就是变形后的L形的短臂。 5.量出视点θ1 、θ2 、θ3。应满意θ 3= θ1 +θ2
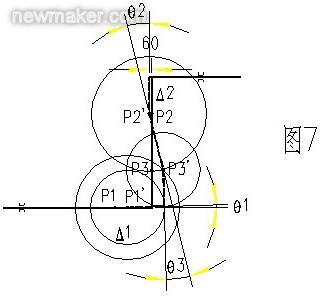
1.也和前面方法相同,找出铰链3变形后的方位P3’。 2.分别以3个变形后的铰链的方位为圆心,以与之相连的变形后的短臂长度为半径画出3个圆。 3.做出3个圆中的2个穿插切线。 4.连线短臂变形后的方位。 5.量出视点θ1 、θ2 、θ3。 θ 3= θ1 +θ2
L或Z形短臂上的铰链尽可能靠近弯头处,使“短的 短”。 的臂长尽可能地长。“长的 长”。 目的:减少铰链的变形视点,进步使用寿命或造价。 留意位于铰链间的支架,应为平面滑动支架,纵横方向的位移量不小,并且还有旋转视点。 求L形的臂为2圆相交;Z形的臂为2圆向切。(end) |
|||||